Shopping Cart
The organic foods products are limited


Sub Total:
$240.00
Total:
$240.00
The organic foods products are limited
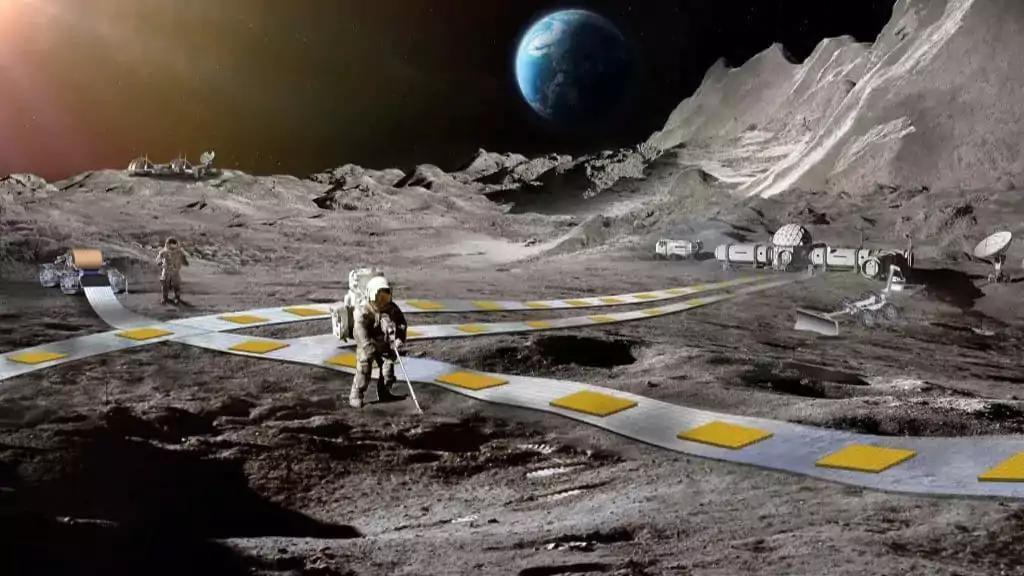
Проект FLOAT основан на использовании левитирующих магнитных роботов, которые движутся по трехслойной пленочной дорожке. Эта инновационная конструкция позволит уменьшить абразивный износ, вызываемый лунной пылью, и обеспечит эффективное средство транспортировки полезных грузов по лунной поверхности. Технология также минимизирует риск для астронавтов, снижая необходимость передвижения человека по лунной поверхности. Эти роботы будут нести тележки, движущиеся со скоростью около 1,60 км/ч, способные перевозить до 100 тонн материалов в день на будущую лунную базу НАСА и обратно. Главной целью FLOAT станет создание надежной, автономной и эффективной транспортной системы для перемещения материалов на Луне, а ежедневные операции планируется начать уже в 2030-х годах. Идея роботизированного поезда, левитирующего на Луне, может показаться прямо-таки из области научной фантастики. Однако НАСА планирует создать постоянную лунную базу в течение следующего десятилетия. FLOAT может сыграть решающую роль в достижении этой цели, обеспечив эффективное средство транспортировки необходимого оборудования и материалов. Основные задачи фазы 2 включают разработку, изготовление и тестирование небольших прототипов роботов. Эти испытания завершатся демонстрацией на аналоге лунного полигона, где будут оценены различные стратегии подготовки площадки и развертывания роботов. Важной частью этого этапа станет изучение влияния условий лунной среды на производительность и долговечность робота. Для оптимизации конструкции будут учитываться такие факторы, как температура, радиация, нагрузка и загрязнение лунного реголита. Кроме того, будет составлена дорожная карта для выявления технологических пробелов и развития производственных возможностей для критически важного оборудования, такого как магнитные решетки большой площади и гибкие печатные платы. В то же время моделирование системных конструкций FLOAT будет уточнено для получения более точных оценок производительности концепции миссии RLSO2.
